Note
Go to the end to download the full example code.
Damage Mechanics Challenge#
This example presents a three-dimensional simulation based on the Purdue-SANDIA-LLNL Damage Mechanics Challenge. For more details, visit the Damage Mechanics Challenge Webpage. The geometry, parameters, and considerations used in this example are derived from the challenge specifications.
Several studies related to this challenge and phase-field fracture simulations are available in the literature, including [Yousef], [Abhinav], and [Jonas].
Although the primary objective of this challenge is to predict damage evolution and failure of the specimen, the focus of this example is to demonstrate a three-dimensional simulation using the phase-field fracture model.
A rectangular plate with an initial notch positioned at the bottom center is used in this example, as shown in the figure below. This beam is supported at its ends, with the bottom-left part fixed in all directions and the bottom-right part fixed in the vertical direction. A vertical displacement is applied at the top. The geometry and boundary conditions are depicted in the figure.
The model is discretized using tetrahedral elements, with refined mesh sizes (denoted as h) in regions where crack evolution is expected. The element size h must be sufficiently small to prevent mesh dependencies and ensure accurate results.
# <------------------------- 76.2-------------------------->
# <--- 24.96--->
# /\ *---------------------||||-------------------------------* /\
# / / u \/\/ _____ / | |
# 12.7 / / |||| /<1> /| / | |
# / / \/\/ / / | / | | 25.4
# \/ *-------------------------------------/-----/--|--------* | |
# | / / / | | \/
# | / / / | *
# | / / / | /
# | /__/ / | /
# | | | / | /
# *--------------------------------. .--------------------*
# /_\/_\ <1> /_\/_\
# /////// oo oo
# <--7.62--> <--7.62-->
# <------------- 43.89 ---------->
# |Y
# ---X
# Z /
Note
The mesh can be generated using Gmsh, as demonstrated in the example .geo File: Challenge Test.
The Young’s modulus, Poisson’s ratio, and the critical energy release rate are given in the table Properties. Young’s modulus \(E\) and Poisson’s ratio \(\nu\) can be represented with the Lamé parameters as: \(\lambda=\frac{E\nu}{(1+\nu)(1-2\nu)}\); \(\mu=\frac{E}{2(1+\nu)}\).
VALUE |
UNITS |
|
|---|---|---|
E |
0.6 |
kN/mm2 |
nu |
0.2 |
[-] |
Gc |
0.00013 |
kN/mm |
l |
1.5 |
mm |
Damage Mechanics Challenge: Predictions based on the phase field fracture model, https://doi.org/10.1016/j.engfracmech.2024.110046
Calibration and validation of a phase-field model of brittle fracture within the damage mechanics challenge, https://doi.org/10.1016/j.engfracmech.2024.110319
Import necessary libraries#
import numpy as np
import matplotlib.pyplot as plt
import pyvista as pv
import dolfinx
import mpi4py
import petsc4py
import os
Import from phasefieldx package#
from phasefieldx.Element.Phase_Field_Fracture.Input import Input
from phasefieldx.Element.Phase_Field_Fracture.solver.solver import solve
from phasefieldx.Boundary.boundary_conditions import bc_xyz, bc_y, get_ds_bound_from_marker
from phasefieldx.PostProcessing.ReferenceResult import AllResults
Parameters Definition#
Data is an input object containing essential parameters for simulation setup and result storage:
E: Young’s modulus, set to 0.6 \(kN/mm^2\).
nu: Poisson’s ratio, set to 0.2.
Gc: Critical energy release rate, set to 0.00013 \(kN/mm\).
l: Length scale parameter, set to 1.5 \(mm\).
degradation: Specifies the degradation type. Options are “isotropic” or “anisotropic”.
split_energy: Controls how the energy is split; options include “no” (default), “spectral,” or “deviatoric.” In this case an anisotropic model with spectral decomposition is considered.
degradation_function: Specifies the degradation function; here, it is “quadratic.”
irreversibility: Determines the irreversibility criterion; in this case, set to “miehe.”
fatigue: Enables fatigue simulation when set to True.
fatigue_degradation_function: Defines the function for fatigue degradation, set to “asymptotic.”
fatigue_val: Fatigue parameter value (used only in fatigue simulations, not in this one).
k: Stiffness penalty parameter, set to 0.0.
min_stagger_iter: Minimum number of staggered iterations, set to 2.
max_stagger_iter: Maximum number of staggered iterations, set to 500.
stagger_error_tol: Error tolerance for staggered iterations, set to 1e-8.
save_solution_xdmf and save_solution_vtu: Specify the file formats to save displacement results. In this case, results are saved as .vtu files.
results_folder_name: Name of the folder for saving results. If it exists, it will be replaced with a new empty folder.
Data = Input(E=0.6, # young modulus
nu=0.2, # poisson
Gc=0.00013, # critical energy release rate
l=1.5, # lenght scale parameter
degradation="anisotropic", # "isotropic" "anisotropic"
split_energy="spectral", # "spectral" "deviatoric"
degradation_function="quadratic",
irreversibility="miehe", # "miehe"
fatigue=False,
fatigue_degradation_function="asymptotic",
fatigue_val=0.0,
k=0.0,
save_solution_xdmf=False,
save_solution_vtu=True,
results_folder_name="1718_Damage_Challenge")
Mesh Definition#
The mesh is generated using Gmsh and saved as a ‘mesh.msh’ file. For more details on how to create the mesh, refer to the Examples gmsh “.geo” files examples. The following lines
msh_file = os.path.join("mesh", "challenge_test.msh") # Path to the mesh file
gdim = 3 # Geometric dimension of the mesh
gmsh_model_rank = 0 # Rank of the Gmsh model in a parallel setting
mesh_comm = mpi4py.MPI.COMM_WORLD # MPI communicator for parallel computation
The mesh, cell markers, and facet markers are extracted from the ‘mesh.msh’ file using the read_from_msh function.
mesh_data = dolfinx.io.gmsh.read_from_msh(msh_file, mesh_comm, gmsh_model_rank, gdim)
msh = mesh_data.mesh
cell_markers = mesh_data.cell_tags
facet_markers = mesh_data.facet_tags
fdim = msh.topology.dim - 1 # Dimension of the mesh facets
Boundary Identification Functions#
These functions identify points on specific boundaries of the domain where boundary conditions will be applied. The boundaries are defined as follows:
bottom_left: Identifies points near the bottom-left boundary. It returns True for points where y=0 and x lies within the range [7.62 - DIS, 7.62 + DIS], and False otherwise.
bottom_right: Identifies points near the bottom-right boundary. It returns True for points where y=0 and x lies within the range [68.58 - DIS, 68.58 + DIS], and False otherwise.
top: Identifies points near the top boundary. It returns True for points where y=25.4 and x lies within the range [38.1 - 0.5 * DIS, 38.1 + 0.5 * DIS], and False otherwise.
These functions allow for precise application of boundary conditions to specific regions of the mesh, which is critical for correctly defining the simulation’s physical constraints.
DIS = 4 # Distance threshold for boundary identification
def bottom_left(x):
return np.logical_and(np.logical_and(np.greater(x[0], 7.62-DIS), np.less(x[0], 7.62+DIS)), np.isclose(x[1], 0))
def bottom_right(x):
return np.logical_and(np.logical_and(np.greater(x[0], 68.58-DIS), np.less(x[0], 68.58+DIS)), np.isclose(x[1], 0))
def top(x):
return np.logical_and(np.logical_and(np.greater(x[0], 38.1-0.5*DIS), np.less(x[0], 38.1+0.5*DIS)), np.isclose(x[1], 25.4))
Using the bottom and top functions, we locate the facets on the bottom and top sides of the mesh, where \(y = 0\) and \(y = 1\), respectively. The locate_entities_boundary function returns an array of facet indices representing these identified boundary entities.
bottom_left_facet_marker = dolfinx.mesh.locate_entities_boundary(msh, fdim, bottom_left)
bottom_right_facet_marker = dolfinx.mesh.locate_entities_boundary(msh, fdim, bottom_right)
top_facet_marker = dolfinx.mesh.locate_entities_boundary(msh, fdim, top)
The get_ds_bound_from_marker function generates a measure for applying boundary conditions specifically to the facets identified by top_facet_marker and bottom_facet_marker, respectively. This measure is then assigned to ds_bottom and ds_top.
ds_bottom_left = get_ds_bound_from_marker(bottom_left_facet_marker, msh, fdim)
ds_bottom_right = get_ds_bound_from_marker(bottom_right_facet_marker, msh, fdim)
ds_top = get_ds_bound_from_marker(top_facet_marker, msh, fdim)
ds_list is an array that stores boundary condition measures along with names for each boundary, simplifying result-saving processes. Each entry in ds_list is formatted as [ds_, “name”], where ds_ represents the boundary condition measure, and “name” is a label used for saving. Here, ds_bottom and ds_top are labeled as “bottom” and “top”, respectively, to ensure clarity when saving results.
ds_list = np.array([
[ds_bottom_left, "bottom_left"],
[ds_bottom_right, "bottom_right"],
[ds_top, "top"]
])
Function Space Definition#
Define function spaces for displacement and phase-field using Lagrange elements.
V_u = dolfinx.fem.functionspace(msh, ("Lagrange", 1, (msh.geometry.dim, )))
V_phi = dolfinx.fem.functionspace(msh, ("Lagrange", 1))
Boundary Conditions#
Dirichlet boundary conditions are defined as follows:
bc_bottom_left: Constrains both x, y and z displacements on the bottom left boundary, ensuring that the leftmost bottom edge remains fixed.
bc_bottom_right: Constrains only the vertical displacement (y-displacement) on the bottom right boundary, while allowing horizontal movement.
bc_top: Constrains the vertical displacement (y-displacement) on the top boundary, while allowing horizontal movement.
These boundary conditions ensure that the relevant portions of the mesh are correctly fixed or allowed to move according to the simulation requirements.
bc_bottom_left = bc_xyz(bottom_left_facet_marker, V_u, fdim)
bc_bottom_right = bc_y(bottom_right_facet_marker, V_u, fdim)
bc_top = bc_y(top_facet_marker, V_u, fdim)
The bcs_list_u variable is a list that stores all boundary conditions for the displacement field \(\boldsymbol u\). This list facilitates easy management of multiple boundary conditions and can be expanded if additional conditions are needed.
bcs_list_u = [bc_top, bc_bottom_left, bc_bottom_right]
bcs_list_u_names = ["top", "bottom_left", "bottom_right"]
Function: update_boundary_conditions#
The update_boundary_conditions function dynamically updates the displacement boundary conditions at each time step. This facilitates quasi-static analysis by incrementally adjusting the displacements applied to specific degrees of freedom.
Parameters:
bcs: A list of boundary conditions, where each element corresponds to a boundary condition applied to a specific facet of the mesh.
time: A scalar representing the current time step in the analysis.
Function Details:
The displacement value val is computed based on the current time:
For gradual loading, val = dt0 * time, where dt0 is a small time step factor (default: 10^-2), simulating incremental displacement along the y-axis.
This calculated value is assigned to the y-component of the displacement field on the top boundary by modifying bcs[0].g.value[1], where bcs[0] represents the top boundary condition. The displacement is negated to represent a displacement in the opposite direction.
Return Value:
A tuple (0, val, 0) is returned, representing the incremental displacement vector:
The first element (0) corresponds to no update for the x-displacement.
The second element (val) is the calculated y-displacement.
The third element (0) corresponds to no update for the z-displacement, applicable in 2D simulations.
Purpose:
This function facilitates quasi-static analysis by applying controlled, time-dependent boundary displacements. It is crucial for simulations involving gradual loading or unloading with controlled displacement evolution.
def update_boundary_conditions(bcs, time):
dt0 = 10**-2
val = dt0 * time
bcs[0].g.value[...] = petsc4py.PETSc.ScalarType(-val)
return 0, val, 0
T_list_u = None
update_loading = None
f = None
T = dolfinx.fem.Constant(msh, petsc4py.PETSc.ScalarType((0.0, 0.0)))
Boundary Conditions for phase field
bcs_list_phi = []
Solver Call for a Phase-Field Fracture Problem#
This section sets up and calls the solver for a phase-field fracture problem.
Key Points:
The simulation is run for a final time of 150, with a time step of 1.0.
The solver will manage the mesh, boundary conditions, and update the solution over the specified time steps.
Parameters:
dt: The time step for the simulation, set to 1.0.
final_time: The total simulation time, set to 150.0, which determines how long the problem will be solved.
path: Optional parameter for specifying the folder where results will be saved; here it is set to None, meaning results will be saved to the default location.
Function Call:
The solve function is invoked with the following arguments:
Data: Contains the simulation parameters and configurations.
msh: The mesh representing the domain for the problem.
final_time: The total duration of the simulation.
V_u: Function space for the displacement field, \(\boldsymbol{u}\).
V_phi: Function space for the phase field, \(\phi\).
bcs_list_u: List of Dirichlet boundary conditions for the displacement field.
bcs_list_phi: List of boundary conditions for the phase field (empty in this case).
update_boundary_conditions: Function to update boundary conditions for the displacement field.
f: The body force applied to the domain (if any).
T_list_u: Time-dependent loading parameters for the displacement field.
update_loading: Function to update loading parameters for the quasi-static analysis.
ds_list: Boundary measures for integration over the domain boundaries.
dt: The time step for the simulation.
path: Directory for saving results (if specified).
This setup provides a framework for solving static problems with specified boundary conditions and loading parameters.
final_time = 40
dt = 1
Uncomment the following lines to run the solver with the specified parameters.
# solve(Data,
# msh,
# final_time,
# V_u,
# V_phi,
# bcs_list_u,
# bcs_list_phi,
# update_boundary_conditions,
# f,
# T_list_u,
# update_loading,
# ds_list,
# dt,
# path=None,
# bcs_list_u_names=bcs_list_u_names,
# min_stagger_iter=2,
# max_stagger_iter=500,
# stagger_error_tol=1e-8)
Load results#
Once the simulation finishes, the results are loaded from the results folder. The AllResults class takes the folder path as an argument and stores all the results, including logs, energy, convergence, and DOF files. Note that it is possible to load results from other results folders to compare results. It is also possible to define a custom label and color to automate plot labels.
S = AllResults(Data.results_folder_name)
S.set_label('Simulation')
S.set_color('b')
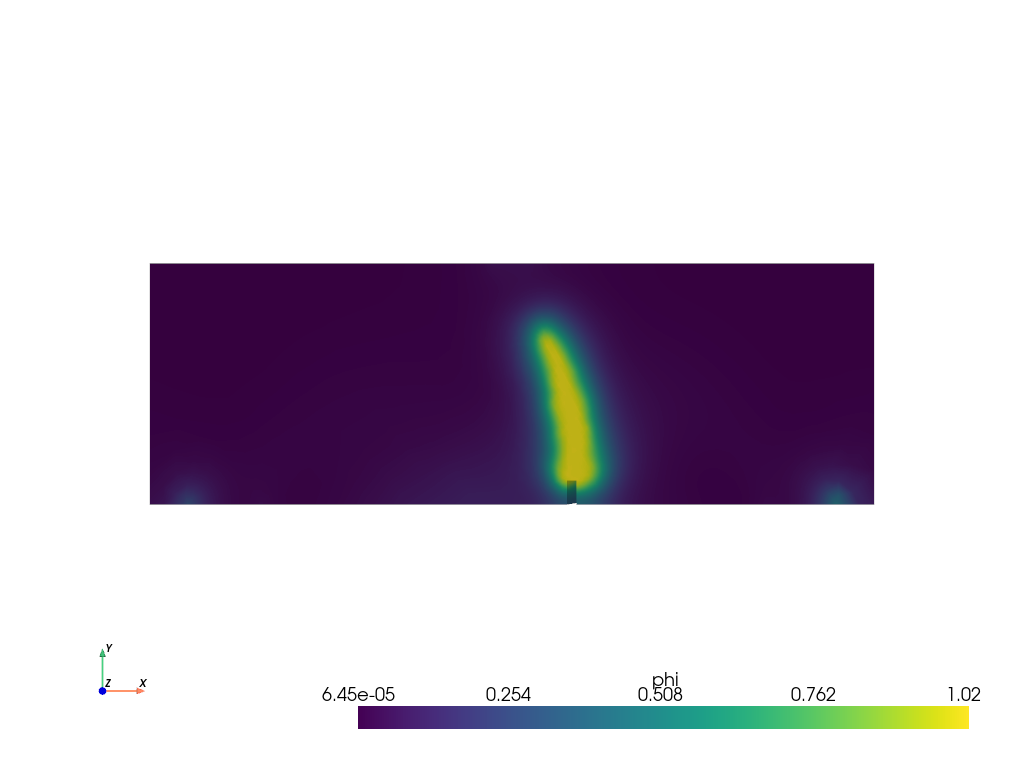
Plot: phase-field \(\phi\)#
The phase-field result saved in the .vtu file is shown. For this, the file is loaded using PyVista.
file_vtu = pv.read(os.path.join(Data.results_folder_name, "paraview-solutions_vtu", "phasefieldx_p0_000037.vtu"))
#
file_vtu.plot(scalars='phi', cpos='xy', show_scalar_bar=True, show_edges=False)
# # %%
# # Create a plotter instance
# p = pv.Plotter()
# # %%
# # Plot all data with opacity set to 0.45
# p.add_mesh(file_vtu, scalars='phi', show_scalar_bar=True, show_edges=False, opacity=0.45)
# # %%
# # Extract and plot values where phi > 0.95 with full opacity
# phi_threshold = file_vtu.threshold(value=0.95, scalars='phi')
# p.add_mesh(phi_threshold, scalars='phi', show_scalar_bar=False, show_edges=False, opacity=1.0)
# # %%
# # Set camera position for a top-down view (xy-plane)
# p.view_xy()
# # %%
# # Display the plot
#p.show()
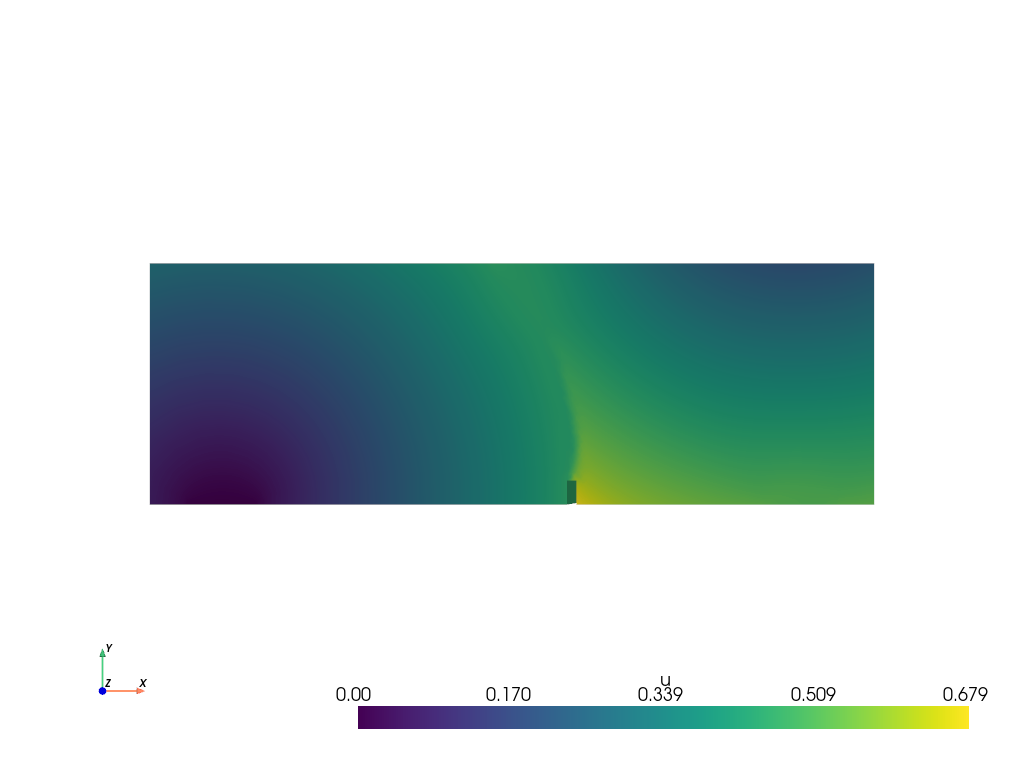
Plot: displacement \(\boldsymbol u\)#
The displacements results saved in the .vtu file are shown. For this, the file is loaded using PyVista.
file_vtu = pv.read(os.path.join(Data.results_folder_name, "paraview-solutions_vtu", "phasefieldx_p0_000037.vtu"))
file_vtu.plot(scalars='u', cpos='xy', show_scalar_bar=True, show_edges=False)
Plot: Force vs Vertical Displacement#
The vertical displacement is saved in S.dof_files[“top.dof”][“Uy”].
displacement = S.dof_files["top.dof"]["Uy"]
# fig, ax_reaction = plt.subplots()
# ax_reaction.plot(displacement, -S.reaction_files['bottom.reaction']["Ry"]*1000, 'k.', linewidth=2.0, label=S.label)
# ax_reaction.grid(color='k', linestyle='-', linewidth=0.3)
# ax_reaction.set_xlabel('displacement - u $[mm]$')
# ax_reaction.set_ylabel('reaction force - F $[N]$')
# ax_reaction.set_title('Reaction Force vs Vertical Displacement')
# ax_reaction.legend()
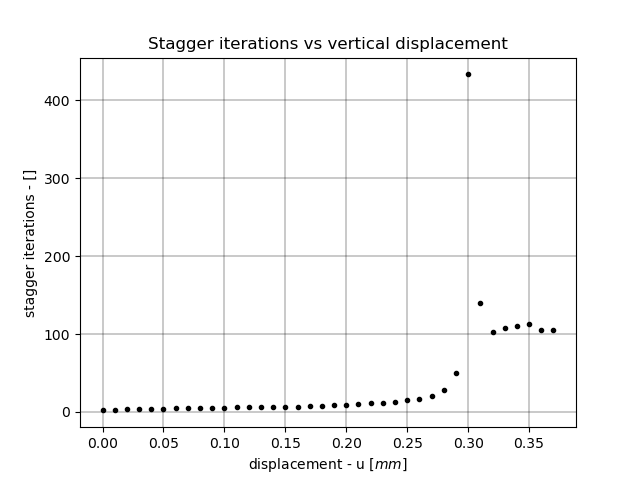
Plot: Staggered Iterations vs Vertical Displacement#
fig, ax_convergence = plt.subplots()
ax_convergence.plot(displacement, S.convergence_files["phasefieldx.conv"]["stagger"], 'k.', linewidth=2.0, label='Stagger iterations')
ax_convergence.grid(color='k', linestyle='-', linewidth=0.3)
ax_convergence.set_xlabel('displacement - u $[mm]$')
ax_convergence.set_ylabel('stagger iterations - []')
ax_convergence.set_title('Stagger iterations vs vertical displacement')
plt.show()
Total running time of the script: (0 minutes 4.165 seconds)